학교 팀 프로젝트_미니 농구 게임 로봇 대회
개발 기간(3개월) - (팀장 및 설계 조립)
1. 게임 규칙
핸드폰으로 컨트롤러를 만들어 정해진 규격의 안의 로봇을 만들어 조종하여 공을 모아 최대한 많은 농구대에 골을 넣는 것이 목표인 게임
2. 사용한 재료
1. 바퀴 2개, DC모터 2개, 모터 드라이브 2개, 타미야 모터 2개, 건전지 홀더 2개, 아크릴 3T 300x300 1장,
아크릴 5t 300x300 2장
3. 게임을 이기기 위해 생각한 전략
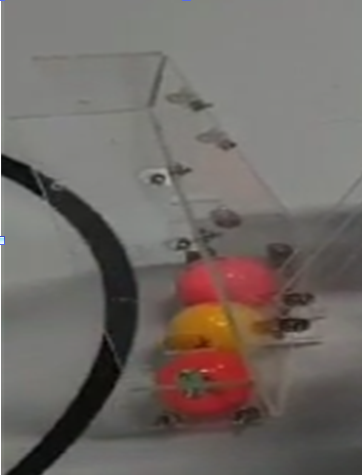
로봇을 조종하여 앞으로 달려가게 하여 공을 밀치고, 지형지물인 벽을 향하게 하여 눌러서 로봇의 앞부분의 팔로, 공을 먹고, 후진을 하여 팔을 뒤로 들어올려 골대에 공을 넣는 방식을 사용
4. 전략을 사용하기 위한 로봇 핵심 설계
로봇의 규격내로 최대한 먹을 수 있는 것을 알기 위해, 공이 들어왔을 경우의 무게와 팔의 무게를 고려하여 Solidworks를 통하여 무게중심을 파악하여 몸통부분에 무게를 최대한 싫어주고 그 무게를 견디게 하기 위해 팔의 연결부분을 짧고 굵게 하며 테스트를 통하여, 공을 3개를 담을 수 있는 바구니의 크기로 설계를하고, 또한 공을 먹었을 경우 공이 다시 빠져나가는 것을 고려하여, 나가지 못하게 하도록 공을 먹는 부분의 바닥부분의 가운데에 길에 틈을 만들어 고정을 시켜줌.
5. 회로 구성
한대의 L298(모터드라이브)로 2개의 DC모터를 제어하고, 들어올리는 힘을 위해 두개의 모터드라이브는 각각 핸드부분의 타미야 모터를 제어하였고, 다음 하나의 모터드라이브로는 아두이노와 스위치에 같이 연결하여 on/off의 기능과 컨트롤러의 동작을 제어하였다. 이러한 것을 원활하게 하기 위하여 회로도면을 미리 그려 테스트를 진행하였다.

6. 구동 프로그램 동작
핸드폰 어플을 통하여 버튼을 눌러 블루투스 모듈을 통해 아두이노로 들어가 아두이노에서 모터드라이브로 넘어가고 DC모터를 출력하여 바퀴 제어를 해준다. 공을 넣을 팔부분 또한 버튼을 이용하여 위와 같이 모터드라이브와 타미야 모터를 제어하여 공을 들어올릴 팔을 올렸다 내렸다 할 수 있게 된다.
위와 같은 동작을 바탕으로 어떤 식으로 대회를 이끌어 나갈지 순서도로 표현 하였다.

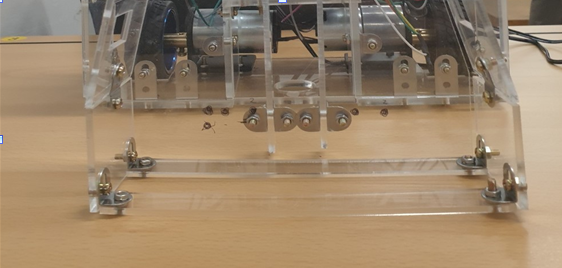
7. 부품 배치도

8. 실제 제작된 로봇

9. 결론 및 후기
처음 프로젝트를 시작하여 어떤 방식으로 공을 넣어야 최대한 많은 공을 넣어야 이길 수 있을까 생각을 하였을 떄, 많은 고민이 있었지만, 팀원들과 소통을 하며 같이 여러 아이디어를 쏟아 내었고, 각 아이디어들의 장점을 하나씩 잘 조화를 이루어내어 공을 밀어먹어 뒤로 넘기는 방식을 채택하게 되었고, 이 방법을 위하여 무게 중심과 부품의 배치, 로봇의 제한된 규격 등을 생각하며 많은 고민을 하며, 같이 만들어 갔다. 비록 만드는 과정에서 가공에 대한 문제가 있어 다시 재가공을 하는 상황으로 가며 조금 안좋게 되었지만. 다행히도 재가공의 기회를 얻어내었고, 한번 문제가 되었던 가공에 대해 문제가 있었기에 좀 더 꼼꼼히 세심하게 살펴보며 다른 문제가 또 있을 수 있는지 재검토를 하며 진행을 하며 많은 부족함과 깨달음을 얻을수 있게 되었다.
처음 프로젝트에서 팀장이라는 직책을 맡게 되며, 내 주도하에 무언가를 만든다는 것이 조금은 부족했을지 모르겠지만 팀원들이 옆에서 조금씩 부족했던 것들을 잘 매꾸어 주며, 나 또한 여러가지를 알게 되었고, 위와 같은 문제를 위해 다음 프로젝트를 할 경우에는 좀 더 주도 면밀하게 팀원들과 자주 소통을 하며, 문제가 있을지 확실하게 검토를 하고 진행을 해야 겠다고 생각했다.